RL Graph Environment: Learning from one instance¶
[1]:
from job_shop_lib.reinforcement_learning import (
# MakespanReward,
SingleJobShopGraphEnv,
ObservationSpaceKey,
IdleTimeReward,
ObservationDict,
)
from job_shop_lib.dispatching.feature_observers import (
FeatureObserverConfig,
FeatureObserverType,
FeatureType,
)
from job_shop_lib.graphs import build_disjunctive_graph
from job_shop_lib.benchmarking import load_benchmark_instance
[2]:
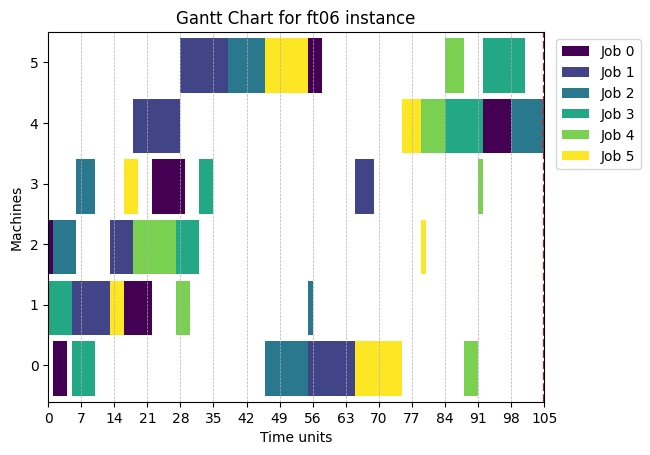
instance = load_benchmark_instance("ft06")
job_shop_graph = build_disjunctive_graph(instance)
feature_observer_configs = [
FeatureObserverConfig(
FeatureObserverType.IS_READY,
kwargs={"feature_types": [FeatureType.JOBS]},
)
]
env = SingleJobShopGraphEnv(
job_shop_graph=job_shop_graph,
feature_observer_configs=feature_observer_configs,
reward_function_type=IdleTimeReward,
render_mode="human", # Try "save_video"
render_config={
"video_config": {"fps": 4}
}
)
[3]:
env.observation_space
[3]:
Dict('edge_list': MultiDiscrete([[38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38]
[38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38 38
38 38 38 38 38 38]]), 'jobs': Box(-inf, inf, (6, 1), float32), 'removed_nodes': MultiBinary(38))
[4]:
len(job_shop_graph.nodes)
[4]:
38
[5]:
import random
random.seed(42)
def random_action(observation: ObservationDict) -> tuple[int, int]:
ready_operations = []
for operation_id, is_ready in enumerate(
observation[ObservationSpaceKey.JOBS.value].ravel()
):
if is_ready == 1.0:
ready_operations.append(operation_id)
operation_id = random.choice(ready_operations)
machine_id = -1 # We can use -1 if each operation can only be scheduled
# in one machine.
return (operation_id, machine_id)
[6]:
env.get_observation()[ObservationSpaceKey.JOBS]
[6]:
array([[1.],
[1.],
[1.],
[1.],
[1.],
[1.]], dtype=float32)
[7]:
random_action(env.get_observation())
[7]:
(5, -1)
[8]:
from IPython.display import clear_output
done = False
obs, _ = env.reset()
while not done:
action = random_action(obs)
obs, reward, done, *_ = env.step(action)
if env.render_mode == "human":
env.render()
clear_output(wait=True)
if env.render_mode == "save_video" or env.render_mode == "save_gif":
env.render()
[9]:
import numpy as np
rewards = np.array(env.reward_function.rewards)
print(f"{len(list(filter(lambda x: x != 0, rewards)))} zeros out of {len(rewards)}")
19 zeros out of 36
[10]:
rewards.mean()
[10]:
-9.11111111111111
[11]:
rewards.sum()
[11]:
-328